
目次
概略
二日にわたって撮影してきたアンドロメダ銀河。ライブスタックを卒業し、DeepSkyStacker(以下、DSS)を使うようになって、初めてのアンドロメダ銀河です。


失敗しながら何とかやっている感じで、問題は色が出ず星雲が見えないことで、訪問者さまのご意見では、露出が短すぎるのではないかということでした。
そこで一昨日の夜、露出を1時間まで延ばしましたところ、そこそこ色が出て、星雲もそこそこ見えてきました。
しかし何か物足りないです。
炙り出しノイズが出たので、まだ露出不足なのでしょう。
しかし、昨夜の結果はまずまずなものでした。
こうしてみるとライブスタックのありがたさが分かる今日この頃、その品質に少しだけ近づけました。
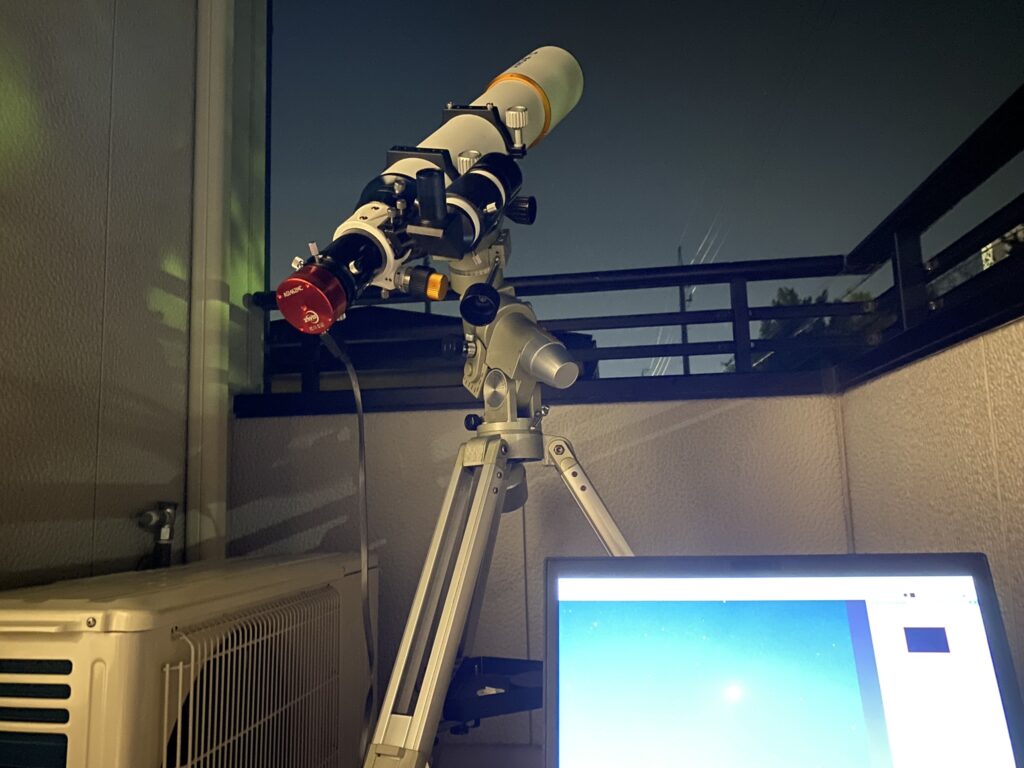
↓アンドロメダ銀河を追尾・撮影するビクセン社スーパーポラリス赤道儀・モータードライブMD-6、SVBONY社鏡筒SV503 102ED
撮影と撮像へと至る経過と結果
極軸設定の状況と自動追尾の状況
極軸設定の状況
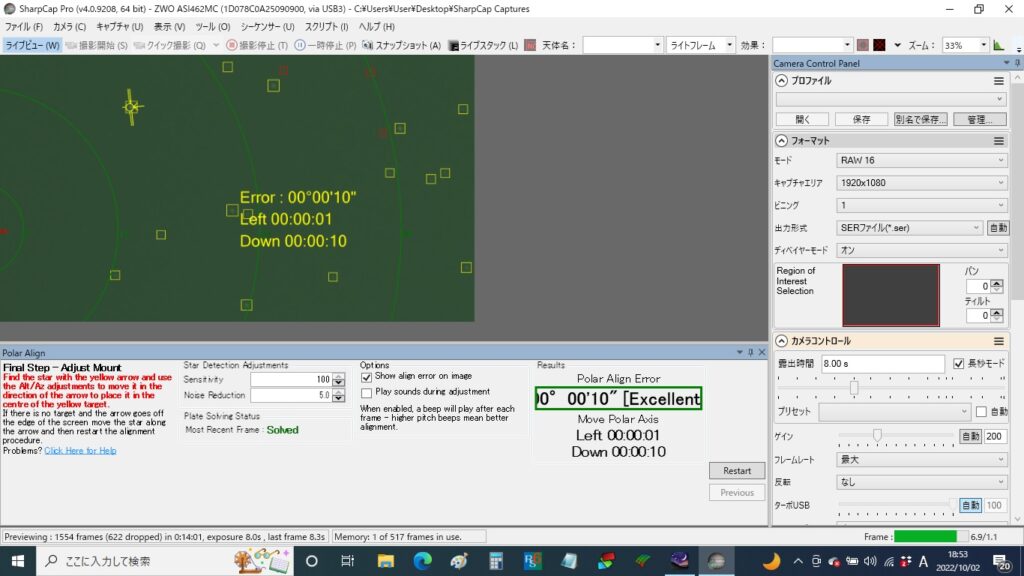
90分間の露出をかけるをつもりでしたので、なんとしても品質の高い極軸設定をしなければなりません。いつも以上に気合を入れて設定しました。
その結果、設定誤差を10″まで追い込みました。110分の追尾の準備は整いました。
自動追尾の状況
110分の自動追尾にもかかわらず、自動追尾の品質は最高でした。ほぼ完全に星を止めました。
一昨日とは別人のようです。1フレーム当たりの露出もいつもの8秒間から10秒間に伸ばしましたが、追尾品質は落ちませんでした。
これなら120分の自動追尾でもなんとかいけそうです。
↓のとおり、ノー修正で以下のとおりです。


基準恒星の目標天体の導入
一昨日のまま変わるところがありません。アルフェラッツは良く見えず、ミラク(等級1.58、赤経 01h 09m、赤緯+35° 37′ )の方が目立って見えたので、目標天体アンドロメダ銀河(赤経 00h 42m、赤緯+41° 16′)までの距離もこちらが近く、基準恒星にはミラクを選定しました。
しかし、昨夜は不調で、目標天体の導入に5回のトライを要しました。
恒星のピント合わせ
基準恒星の過程で恒星のピント合わせをしました。いつものバーティノフマスクでの設定です。
すでに設定後ですが↓ミラクです。

撮影と撮像の結果
[撮影に使用した機器、ソフトウェア]
赤道儀:ビクセン社スーパーポラリス赤道儀
鏡筒:SVBONY社SV503 102ED D=102mm・f=714mm・F値7、EDアポクロマート、×0.5レデューサー使用
カメラ:ZWO社CMOSカメラASI462MC
自動追尾:ビクセン社MD-6
撮影・スタック:SharpCap 4.0 (64 bit)による撮影、GAIN250、10秒間のfitsフレーム660枚を撮影・うち594枚(99分)を、DeepSkyStackerでコンポジット・ダーク補正・フラット補正
画像編集:GIMPによるレベル補正、トーンカーブ調整、色強調・colorenhance処理
使用フィルター:UV/IRカットフィルター
撮影場所:自宅ベランダ
撮影日:2022年10月2日
撮影の結果
99分の露出でようやく星雲が、楽に確認できるようになりました。この段階で塵の帯も確認できます。
中央の飽和を解消するには、やはり多段階露出とかを行わないとだめなのだろうか。

撮像の経過と結果
色レベル補正
かなり星雲の広がりが分かるようになりました。もう一息です。

トーンカーブ補正
まずまずアンドロメダ銀河に似てきました(^-^;

色強調、colorenhance処理
あまり変わりませんね。これでアンドロメダ銀河第三弾の完成とします

まとめ
これで、一旦アンドロメダ銀河沼から足を抜こうかと思います。大銀河のDSSによるコンポジットは思ったよりも混乱しました。
他の銀河などの場数を踏んで、パラメーターの意味など理解していきたいと思います。
しかし昨夜の自動追尾は、とても安心してみていられました。
いつもこうだと嬉しいです。原因は管理人にあるんですけどね。
カメラセッティング
[ZWO ASI462MC]
FrameType=Light
#ディベイヤーモード
Debayer Preview=On
#パン
Pan=0
#ティルト
Tilt=0
#出力形式
Output Format=FITS files (*.fits)
#ビニング
Binning=1
#キャプチャエリア
Capture Area=1920×1080
#モード
Colour Space=RAW16
#温度
Temperature=30.2
#高速モード
High Speed Mode=Off
#ターボUSB
Turbo USB=100(Auto)
#反転
Flip=None
#フレームレート
Frame Rate Limit=Maximum
#ゲイン
Gain=250
#露出時間
Exposure=10.000s
#タイムスタンプ
Timestamp Frames=Off
#ホワイトバランス(B)
White Bal (B)=69
#ホワイトバランス(R)
White Bal (R)=46(Auto)
#輝度
Brightness=205
Auto Exp Max Gain=500
Auto Exp Max Exp M S=31615
Auto Exp Target Brightness=109
Mono Bin=Off
#トレイル幅
Trail Width=3
#トレイルの最小長
Minimum Trail Length=100
#トレイル検出感度
Trail Detection Sensitivity=9
#サテライトトレイルを削除する
Remove Satellite Trails=Off
#背景減算
Background Subtraction=Off
#自動位置合わせ(惑星/銀河)
Planet/Disk Stabilization=Off
#しきい値
Banding Threshold=35
#バンディング除去
Banding Suppression=0
#フラット補正
Apply Flat=None
#ホットピクセル感度
Hot Pixel Sensitivity=5
#ダーク補正
Subtract Dark=None
NegativeDisplay=0
#シャドウポイントを表示
Display Black Point=0
#中間調ポイントを表示する
Display MidTone Point=0.5
#ハイライトポイントを表示
Display White Point=1
#注意
Notes=
TimeStamp=2022-10-02T10:33:26.9492220Z
SharpCapVersion=4.0.9208.0
StartCapture=2022-10-02T10:33:26.8566272Z
MidCapture=2022-10-02T11:14:32.4176272Z
EndCapture=2022-10-02T11:55:37.9783260Z
Duration=4931.122s
FrameCount=480
ActualFrameRate=0.0973fps
TimeZone=+9.00


コメント