準備
SharpCapの極軸設定機能を使って、正確に極軸を設定し、追尾誤差の原因がどこにあるのか、追求するため、昨日はプチ遠征をしました。

16時頃に、遠征場所である、ある河川敷の公園に入り、17時には準備を終えました。
久しぶりの、望遠鏡の分解組み立てとあって、少し手間取りました。
北の空の状態はこんな感じでした。いけそうです。

そして、観測基地の設営が終わりました。

↓あの彼方に、あんなに見たかった北極星が!

極軸設定開始
SharpCapを、TOOL→Polar Alignと進み、設定の開始です。
星の数
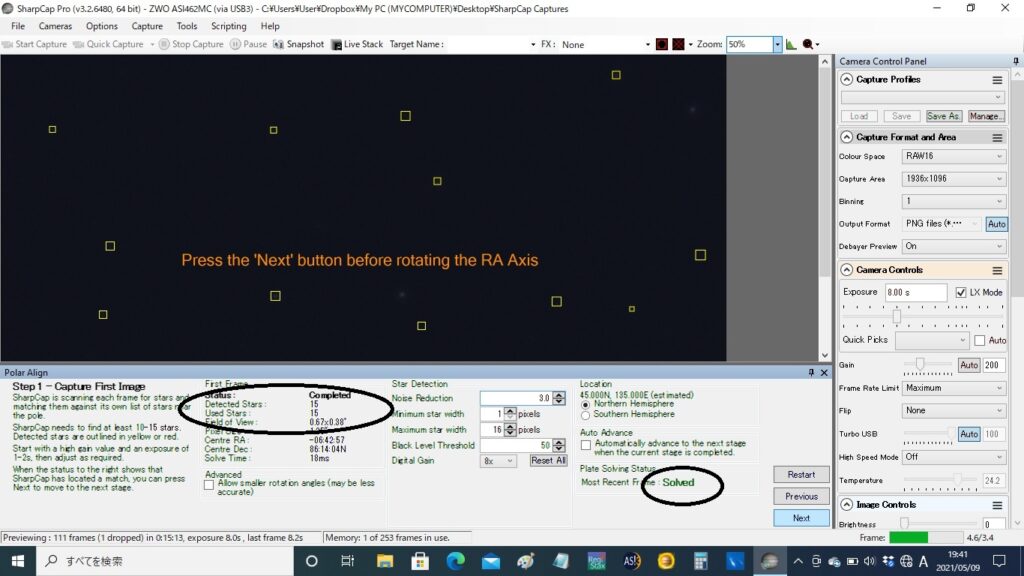
SharpCapが極軸を決めるのには、星の数15個が必要です。
管理人のCMOSカメラASI462MCは、画角がとても狭く、15個も集まるのかどうか心配されましたが、何とかなったようです。
そして、SharpCapがもっている星図と一致したということでしょうか、右下の表示が「SOLVED」を示しました。
何とかうまくいきそうな感じ。
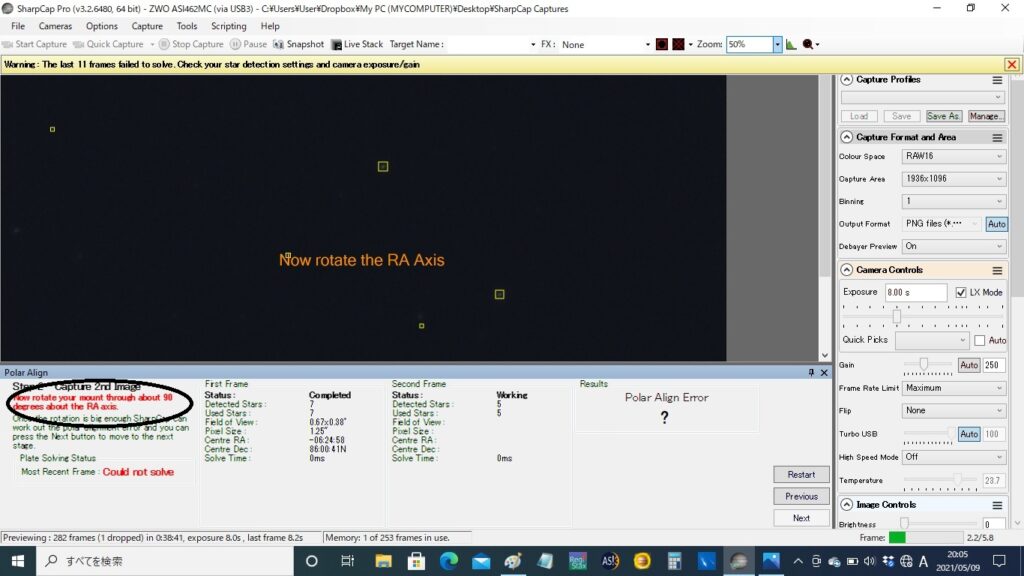
安定してSOLVEDの表示になるようになったら(ここははっきりわからないのですが)、以下のような表示が。
約90度赤経軸を回せと。
素直に90度回しました。これを何度も行うことで、誤差を割り出し、極軸のずれを直していくということなのでしょう。
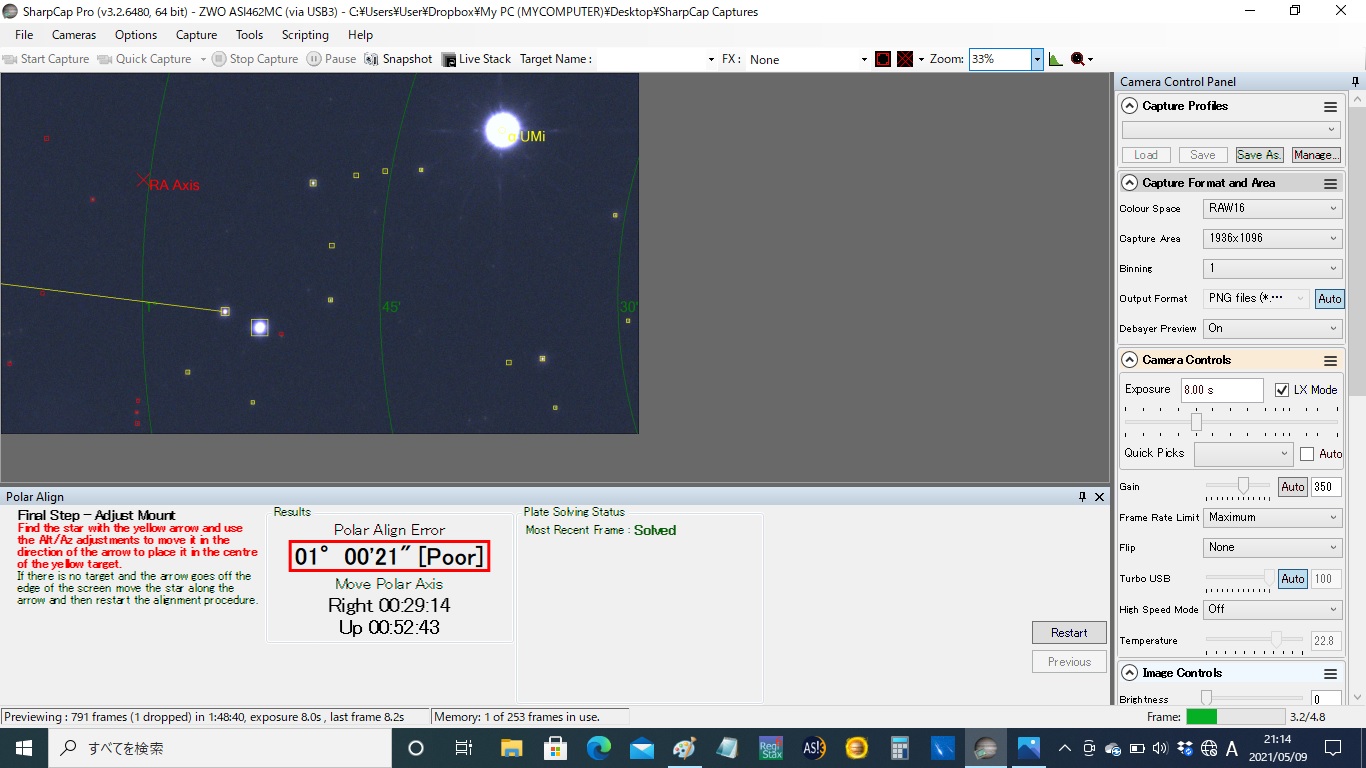
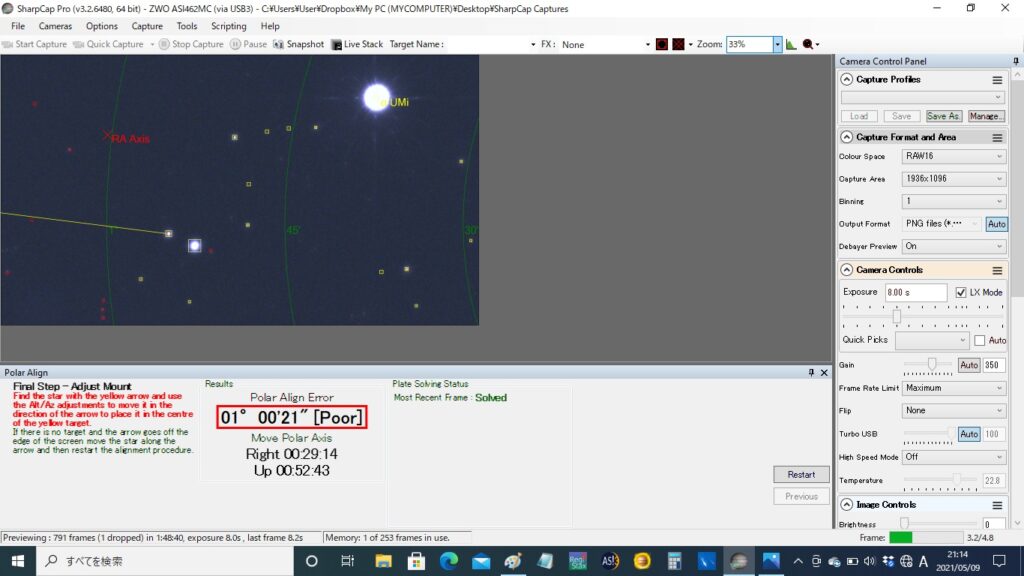
何度か回転させたものの、状況は変わらず、最終的に以下のような画面が出ました。
どうやら結果は、POORのようです。
四角で囲われたところが、極軸との誤差を示していますが、1°以上の誤差が出ています。
そして、「POOR」だと。これじゃダメですという意味でしょう。
それを修正せよとの指示が左下隅に赤字でかいてあります。
修正は、黄色い矢印に従って行えと。
Samさんのブログにもある、同心円状のマーカーの一部が見えています。
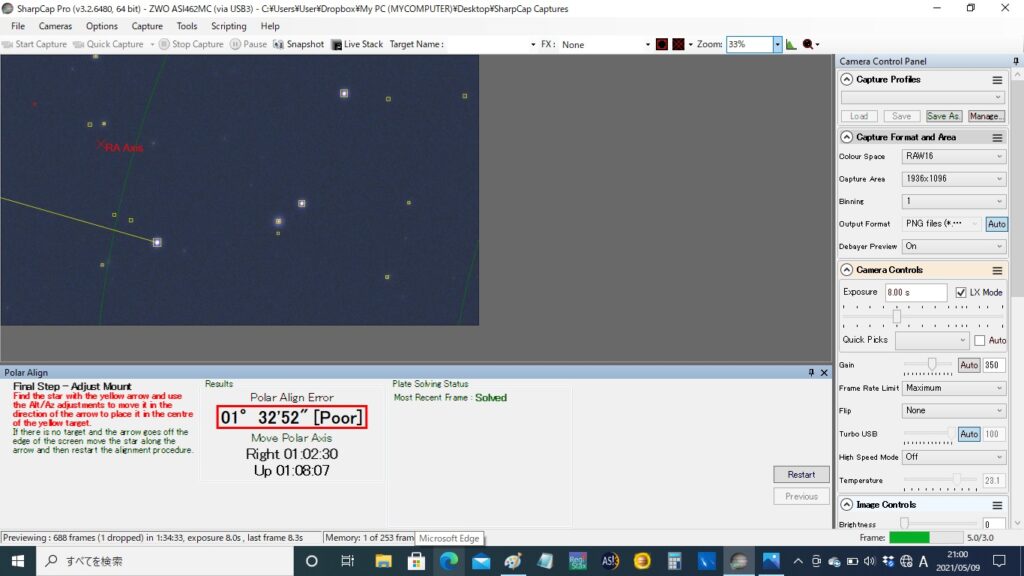
なお、同じことをもう二回行いました。結果は以下のとおりで、少し誤差が少なくなりました。
もう一回は、最終的にエラーで終了してしまいました。
その先の操作をしていない
ここで冷静になれず、黄色い線に沿って、赤道儀の東西調整・高度調整を使って、その先にあるであろう空の北極点に目指さなければならなかったのです。
情けないことに、それに気づけませんでした。
修正操作をしていない?
上記で、黄色い矢印を目指して修正せよとの指示ですが、残念ながら、ここでてんぱってしまい、何の手も打てずに終了です。
時間も21時をまわり、翌日仕事だし、ここで撤収することにしました。
ここではたと気が付きました。
SharpCapで極軸設定を始める前は、方位磁石で北に極軸を向けていました。
そのうえでSharpCapが極軸に導いてくれるはずでした。つまり、こちらの方向に調整しなさいと。
それ、やってないです。画面の表示を見落としたかもしれませんが。
つまり、一度も極軸の方向を修正していないのです。
だから、何度極軸を赤経方向に90度に回しても、誤差は、設定作業をスタートする時点のまま残ってしまったことになります。
まとめ
今回、初めての遠征ということもあり、暗さとの戦いを初めて経験しました。スマホの照明を使ったもののやはりあの暗さは、ベランダの暗さとは全然違いました。ランタンみたいなものが必要かもしれません。
SharpCapによる極軸設定は、1°以上の誤差が出る「POOR」な結果に終わりました。
というか、POORな結果を調整するのを忘れたということでしょうか。
しかし、明るい兆しが見えた気がします。
SharpCapのこの機能を使うには、1度から5度の画角が必要です。管理人のカメラは、画角が0.4から0.7度。
それでも、それなりに結論を出してくれました。そして星も15個つかんでくれました。
この一回の反省点を抱えて、今週末も挑戦してみたいと思います。


コメント
Poorどころか、Close to be excellentですよ! ここまできたらあと少しです。
あとはお気づきの通り、黄色の線に従って、星を移動するように赤道儀の向きを変えるだけです。この際微動ハンドルとかは絶対触ってはダメですよ。実際、どこを触ればいいかは把握されていますでしょうか?赤道儀の下の方にある水平方向のネジと、垂直方向のネジで微調整するだけです。
もうここからは極軸合わせで一番面白いところです。1分角以下、できれば0.5分以下くらいのExcellentを目指してみてください。
うまく極軸が合うと、ピリオディックモーションが支配的になってきます。ピリオディックモーションの周期は10分程度なので、動画に撮っておくと動きがよくわかります。ピリオディックモーションだけが見えていれば、モーターは合格です。極軸を合わせたはずなのに、それでもピリオディックモーションに加えて徐々に東西にずれていくようなら、モーターを疑った方がいいかもしれません。
Samさん、ありがとうございます。
そう言ってもらえて、涙が出ました。報われたって。まあ、もっともSamさんのおかげでここまでたどり着いたんですけどね。
水平方向のねじ、垂直方向のねじ、わかります。極軸調整って大変なイメージがありますが、こうしてみると楽しいですね。ここまで来たら高い精度、Excellentを狙おうと思います。
ピリオディックモーションだけ見えることを祈っています。ここでモータードライブを失うのは痛いですから。
今回は、遠征の注意点から始まり、色々と勉強になりました。
今週末は雨模様なので、再チャレンジは少し遅れますが、楽しみです。