
経緯
連休中に、ak_uchiさんから、管理人の持っているモータードライブMD-5より一世代新しい、スーパーポラリス赤道儀用のモータードライブ、MD-6をいただくことができました。


一昨日のテストでは、軽微な追尾誤差がありましたが、Polar Scope Align Proによる極軸設定だったので、極軸設定が不十分だったせいだろうと思っていました。
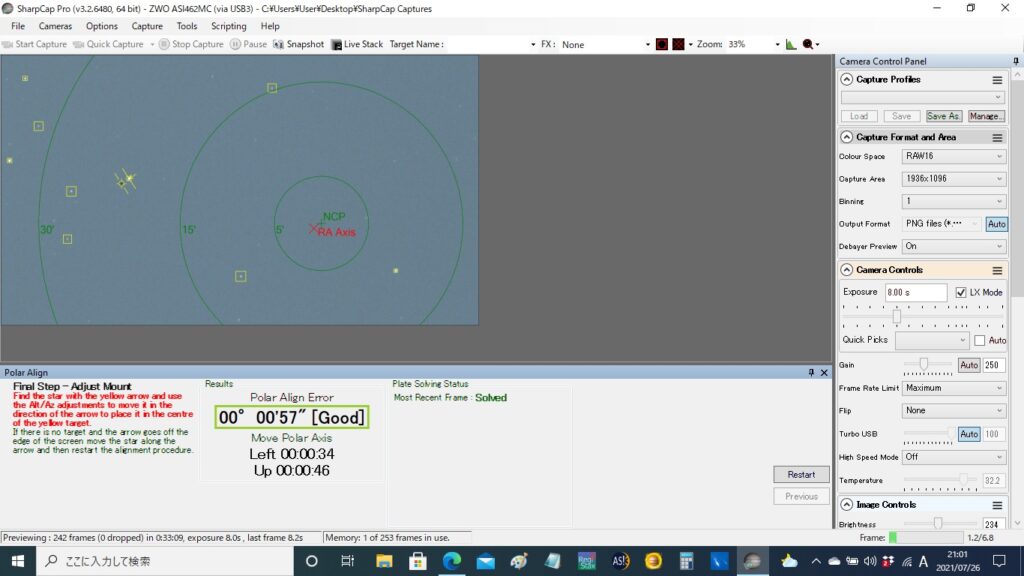
そして、昨夜、奇跡的に北極星が見えて、SharpCapにより正確な極軸設定ができました。
設定誤差は57″。十分正確な追尾のできる結果です。
しかし、なぜか星はほとんど見えず、基準恒星を設定することが出来なかったため、何かの天体ではなく、夜空で細かい星の見える風景写真を撮影することにしました。
MD-6とNEWポラリス赤道儀のコンビによる初の本格的な撮影です。
撮影結果
ライブスタックの個々のフレームの状態を見る限り、星はほとんど止まって見えました。
しかし、残念ながら、星はじわじわと動いていたのです。
[撮影、画像処理をした機器、ソフトウェア]
赤道儀:ビクセンNEWポラリス赤道儀
鏡筒:SVBONY社SV503 102ED D=102mm・F=714mm・F値7、EDレンズアポクロマート。
カメラ:CMOSカメラASI462MC
自動追尾:MD-6(ビクセン)、
撮影及びスタック:SharpCap 3.2 (64 bit)で撮影・ライブスタック
画像編集:SharpCap 3.2 (64 bit)ヒストグラムで炙り出し。。
その他:UV/IRカットフィルター使用
①撮影一回目
露出8秒間、総スタック時間2408秒(40分8秒)、GAIN300。赤経01h 04m、赤緯+79°57′。
40分の追尾でこの誤差(画像の周りの黒い枠)は、管理人にとっては許容範囲なのですが。新しいモータードライブとしては少し寂しい結果です。
SharpCapの極軸設定にしては珍しく南北のズレも見られます。

②撮影二回目
これに関しては、かなりショックを受けました。雲の合間を縫っての撮影でしたので、総スタック時間は短くなってしまいましたが・・・
露出8秒間、総スタック時間1160秒(19分20秒)、GAIN300。赤経22h 56m、赤緯+32° 30′ 。
19分の総スタック時間で、この誤差です。正直なところかなり凹みました。
そして、これは東西方向のズレです。
SharpCapの極軸設定は、二回目以降少しずつずれていくことは経験上分かっているのですが、ここまでのズレを発生させた極軸ズレを起こしたのでしょうか。

追尾誤差の原因
①極軸設定
これはSharpCapによって正確に行っていますので、可能性としてはかなり低いです。
しかし、前述したように、二回目の撮影以降で極軸はズレてしまうことが分かっているので、極軸設定不良は無視できません。
しかし、撮影一回目もそれなりにズレているからな・・・
⓶赤道儀のバランス
撮影前に、モータードライブと赤道儀に負荷が大きくかからないように、そして、望遠鏡が勝手に傾いたりしないように、バランスウェイトのチェック、鏡筒の設置位置のチェックもしました。チェックが甘かった可能性はあります。
結構撮影後に、実は調整が甘かったということもあります。
NEWポラリス赤道儀の寿命
一番考えたくないこと。
37年経過しているNEWポラリス赤道儀自体に誤差が発生していてもおかしくありません。
オーバーホールをしたら改善するでしょうか。
まとめ
今回の撮影結果は、ちょっと衝撃的でした。モータドライブを新しくしても追尾誤差が大きく出る?
一番恐れていた時がやってきたのでしょうか。
NEWポラリス赤道儀の寿命
アリミゾ化もやったばかりで、かなりの愛着があります。
正直、今もショックを引きずっています。
まあ、一回の撮影では分からないだろうということで、何とか自分を納得させています。
まだ何か追尾誤差を起こす原因があるはずです。
しかし、しばらくは台風などで雨です。次のテスト撮影が待ち遠しい!


コメント
こんにちは。
うーん。。。
0.5×レデューサー入れて357mmですよね。そのカメラって1/3くらいのセンサーではありませんか?
と言うことはフルサイズ換算2500mm近いのでは?
皆さんフルサイズで400mm位で3分が流れるのでオートガイドとかやってるわけだから、ある意味逆に凄いのでは?
こたろうさん、ありがとうございます。
カメラの画角は、5.6×3.2mmでかなり狭いです。
あと、すみません、レデューサーは今回使用していませんでした。つい勢いで記載してしまいました。
確かに、この画角の狭さですから、そういう見方もできますね。なんだかそういわれると嬉しいです。
今までは、F=910mmに×0.5レデューサーつけてやってたわけですから、今は追尾精度がシビアになっているというのもありますね。
もしかすると、これが正常な状態なのでしょうか?そうなら嬉しいです。
ノータッチでしょ?
こたろうさんが言うように凄いと思いますよ。
カメラde遊ingさん、ありがとうございます。
力強いお言葉、嬉しいです。やっぱりこれが正常なんでしょう。確かにビクセンの80Mを使っていた時には、DSOは、f値5.6くらいで撮影していて、今はf値7で撮影していますから、精度がシビアになって当然なんですよね。
いつもありがとうございます。
こんにちは。
もしかして赤道儀の「ピリオディックモーション」をご存じないのかな?
ピリオディックモーションとは、ウォームギアの加工精度による回転誤差のことです。これは赤道儀に使われているウォームギアにはかならずついて回る誤差でして、この誤差の少ない赤道儀は高価です。
誤差は高級機で+-5~10秒。 私が差し上げようとしている SP 赤道儀で+-20~40秒と言われています。
NP 赤道儀のピリオディックモーションのデーターは Web では見当たらないのですが、SP 赤道儀よりも誤差が多いと思われます。
きよりんさん、ありがとうございます。
ピリオディックモーションについてはおぼろげながらわかります。今回の追尾誤差がそうなのかもしれないということですね。極軸設定が正確なら残るのはピリオディックモーションで、それも大きく出るのか小さく出るのかで、画像が変わるわけですね。いつも一定ではないと。
今回の2枚の画像が大きく結果が違ったのも、ピリオディックモーションの出幅のせいかもしれません。
次回の撮影を早くやりたくて仕方がありません。天気が悪くて待ちきれません。
アドバイス感謝します。これからもよろしくお願いします。
ピリオディックモーションが撮像範囲の何ピクセル分になるか、計算してみました。
———-《機材》———-
【撮像素子】ASI462
ピクセルサイズ:2.9×2.9[μm]
解像度:1936×1096[ピクセル] →撮像素子サイズ:5.61×3.18[mm]
【光学系A】ビクセン ポラリス80M+0.5倍レデューサー
口径:80[mm]、焦点距離:455[mm] ←910[mm]×0.5
【光学系B】SVBONY SV503 102ED
口径:102[mm]、焦点距離:714[mm]
———-《考察》———-
(1)焦点距離の比
1.57[倍] ←714÷455
★光学系をAからBに交換すると、ズレは1.57倍大きくなる。
(2)撮像素子に写る範囲[分角]
長辺方向 短辺方向
【光学系A】 42.4 24.0※
【光学系B】 27.0※ 15.3
※満月を撮像すると、【光学系A】では短辺方向に収まらずにはみ出し、【光学系B】で
は、長辺方向に収まらずにはみ出す。(一部、実際に体験済みのはず。)
(3)ピリオディックモーション(以下、PMと略記)
PMの周期的な進み遅れは、±◎◎[秒角]のように表される。最大から最小までの幅で表
すと、例えば、±30[秒角]→60[秒角]=1[分角]となり、これをピクセルに換算すると、
【光学系A】 46[ピクセル] ←1096÷24.0 (または、1936÷42.4)
【光学系B】 72[ピクセル] ←1096÷15.3 (または、1936÷27.0)
★PMが±60[秒角]ならばこの2倍。これ位のズレは許容範囲内、と見なすことができる
かどうか。
———-《まとめ》———-
・PMの周期の10分間(←赤道儀のウォームの歯数144より)を超える撮像時間において
「追尾誤差が累積して増加する」ならば、『PM以外に何かの要因がある』と考えられる。
・まず、「東西方向のズレ」の方向の規則性の有無について確かめてみては?
まいくろさん、ありがとうございます。
ちょっとついていけてないですが、PMはSV503 102EDの方が大きいのですね。144ピクセルを許容できるかどうかですか・・・難しいところですが、何とも言えません。オートガイドまでするつもりはないので、許容せざるを得ないとは思います。
PMの周期の10分間を超える撮像時間において「追尾誤差が累積して増加する」していると思います。
東西方向ののズレの規則性、確かめてみます。実際のところ、最近の追尾誤差のほとんどが東西方向のズレです。
もうひと頑張りしてみます。
いつもありがとうございます。感謝しています。
「重箱の隅」ですみません。
>>PMはSV503 102EDの方が大きいのですね。
・PMの大きさは、赤道儀の追尾のふらつきなので、光学系を変えても変化しません。
(実際には、光学系の質量やバランスが影響するでしょうけれど。)PMの大きさが変わ
らなくても、焦点距離が大きい光学系の方が、同じ撮像素子に対して「ズレが大きく写る」
わけです。
《その他のチェックポイント》思いついた順であり、実行順ではありません。
・東西方向のズレの方向に規則性があり、時間に比例して大きくなっているか。
・東西のバランスは、均等ではなく、わずかに東側を重くしているか。
・南中前の天体撮影において、望遠鏡が西側でウェイトが東側になっているか。
・ASI462からのケーブルは、カメラ本体からぶら下がっているのか。
・わざと三脚、鏡筒、カメラケーブル等にわずかな振動を加えたとき、撮像がどの程度変
化(大きさ・方向・振動が収まるまでの時間)するか。
・天体の赤緯0度と赤緯45度とでは、東西方向のズレの大きさに違いがあるか。
まいくろさん、ありがとうございます。
ズレの写り方の問題なのですね。単なる口径や焦点距離の問題ではない、ということですね
チェック項目、ありがとうございます。
規則性については、無いですね。東側を少し重く、これはやっていません。実践することにします。ウェイトは東側ですね。ケーブルぶら下がってます。ショックを与えた様子を試したことはないですが、試してみます。
最後のチェックポイントは、赤緯0度、45度で、撮影してみて、恒星のずれを見てみて、ということですか?
教えていただければ。。。
《回答》
日周運動による、天の北極に対する恒星の回転角度は、どの恒星でも同じですが、移動量
は赤緯0度の恒星が最大で、赤緯のコサインに比例します。赤緯45度で約0.71倍、
赤緯60度で0.5倍と小さくなっていきますが、「実際に現れるズレ」はそういう傾向
があるのか・ないのか。
《追加》
・南中以降の天体撮影の場合、望遠鏡を東側・ウェイトを西側にした時、ズレの方向に変
化があるか。
・ぶら下がっているカメラケーブルの中央を持ち上げた時(カメラにケーブルの重さが加
わる、加わらないの違いが生じた時)、撮像に影響があるか。
・当初、写野の中央にあった恒星が、時間経過とともに、
a)西へ(日周運動で移動する方向)ズレる→追尾速度が遅い。
b)東へズレる→追尾速度が速い。
MD-6の箱の中は、水晶発振で正確なはずだが、経年変化も考えられる。
★PMについて
追尾の進み・遅れの1つの周期が10分で、次の10分間にまた進み・遅れ、さらに次の10分
間にまたまた進み・遅れ、…を繰り返します。(基準は決まっていないので、遅れ・進み
を繰り返す、と見なすこともできます) だから10分以上の撮像では、PMによるズレは
「累積しない」わけです。じゃあ、ズレの原因は?とにかくズレの規則性・特徴を見つけ
ることにつきます。
まいくろさん、ありがとうございます。
うーん、回答について、検証してみます。何分天候不順であり、実行にすぐに移せないことが残念です。
チェックポイント
・ウェイトを西側にしたことがありません。これも試してみます。
・確かにケーブルがブランブランしているのは追尾に影響がありそうですね。
・西にズレることが多いですね。遅れている状況が多いです。
・確かに、現在のズレは累積していきます。ズレの規則性、何とか見つけてみます。
いつもありがとうございます。今後ともよろしくお願いいたします。
マイクロさんへ。
おっしゃることは正論間違いないと思います。m(__)m
ただ、この場合ニューポラリスに700mm超えの筒。1/3サイズ以下のセンサーってこと考えるとそれ以前に考慮するものがあると思います。
同じ条件の場合を高橋製の赤道儀でも点像に止めるのは至難の技かと。。。
超短秒時をライブスタック(この段階でスタックしてますよね)それを複数枚スタックなので、見た目上点像を保ってますが、これ一般的な5分の一枚もの等ならまず使えないものではって思います。ライブスタックでなければ、主様の仰るとおり、画面の三分の1はズレて使えないものになるのではって思うのですがいかがでしょうか?
こたろう さんへ。
会話だったら1分で問題解決なのでしょうけど、文字ベースだとハードルが上がりますね。
《追尾のズレに関する、私の発言の整理》
(1)コメントの流れで赤道儀のPMの話題になったので、PMによって実機の撮像素子上
で何ピクセルずれるか計算した。(7月28日 5:32 PM)
→1[分角]として、72[ピクセル]
(2)PMの周期を超える長時間撮像において、ズレは「累積しない」(7月29日 5:42 PM)
ブログ主の sanpojin さんが「ズレが時間とともに累積している」と判断しています。10
分間の撮像では、PMの分だけスタック画面がズレますが、20~40分間の長時間の撮像で
「ズレが累積してもっとズレる」のは‘PMが大きい赤道儀だから’じゃなくて、『PM
以外の要因がある』と私は考えました。換言すると、
『何かの原因を解決できれば、長時間ライブスタックでも画面のズレを現状よりは小さく
できる』※
ということです。原因を究明できるかは分かりませんが、そもそも機材の振動等がスタッ
ク画面のズレの大きさにどの程度影響があるか現時点で不明なので、それらを定量的に知
ることは意味があると考えています。
※PMが避けられないので、ズレは0にはなりません。赤道儀を変更しても、ズレが0に
ならないのは同様です。
この回答が、ご質問の主旨から外れていたら、すみません。
画像(1)…総スタック時間 40分08秒、赤緯+79°57′“許容範囲”
画像(2)…総スタック時間 19分20秒、赤緯+32°30′“かなりショック”
2つだけの比較なので、本質を捉えていない可能性がありますが、
【仮説】赤緯が天の赤道に近いほど、ズレが大きい。
《提案1》1セット10分で総スタックを終了し、これを連続して複数コマ撮像する。
→1コマあたり、PM等の影響で「黒い枠」が少し発生します。2コマめ、3コマめ…と
比較するとズレの傾向が分かるかも。
《提案2》《提案1》を異なる赤緯でもやってみる。
まいくろさん、ありがとうございます。
それは面白い実験ですね。今の調子だと三コマ目で黒い枠で覆われそうですが、何かの傾向は分かるかもしれませんね。極軸が合わせられた時にためしてみます。
赤緯が点の赤道に近いほどズレが大きいのは、あると思います。異なる赤緯でやってみなければなりませんね。
アドバイス感謝します。これからもよろしくお願いします。
まいくろさんへ。
ご意見趣旨了解しました\(//∇//)\
PM以外の要因が有るって事で了解です。
私もそう思います。通常は1枚が5〜10分で数十枚のスタックですので私自身も少しわかりにくくなってるんですが。。。(笑)3時間分のスタックでも数ピクセルの黒い筋くらいのズレなもので、、、まあーオートガイドかましてますからねd( ̄  ̄)